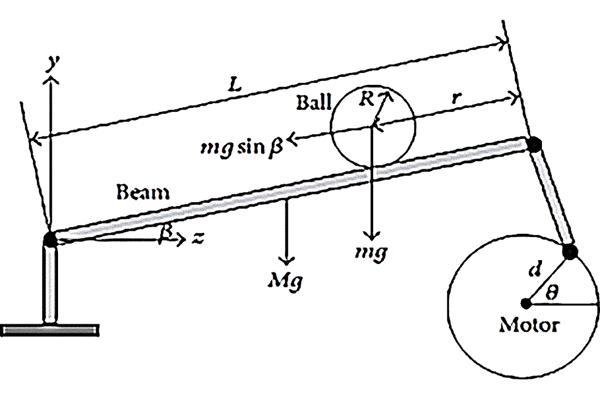
در این مقاله، کنترل حالت لغزشی Super Twisting Sliding (SSTWSMC) برای کلاس سیستمهای ضعیف مورد بررسی قرار گرفته است. در سیستمهای بدون عملکرد، طراحی کنترل مستقیماً مانند سایر سیستمها (که به عنوان سیستمهای کاملاً فعال شناخته میشوند) قابل اجرا نیست. بنابراین، در مرحله اولیه، یک مدل غیرخطی نامشخص از سیستمها به شکل متعارف قابل کنترل تبدیل میشود و سپس کنترل حالت لغزشی مبتنی بر Smooth Super Twisting (SSTW) برای هدف طراحی کنترل برای کلاس در نظر گرفته شده است. علاوه بر این، پایداری حلقه بسته تکنیک پیشنهادی به روشی جذاب ارائه شده است. اثربخشی و برتری تکنیک کنترل پیشنهادی با تجزیه و تحلیل گسترده بین کنترل حالت لغزشی معمولی (SMC)، کنترل حالت لغزشی فوقپیچان (STW) و کنترل حالت کشویی فوقپیچان صاف (SSTWSMC) اثبات شده است. تجزیه و تحلیل جامع ویژگی هایی مانند افزایش استحکام، زمان ته نشینی، تلاش کنترلی، کاهش پچ پچ، بیش از حد، همگرایی حالت لغزشی و غیره را ارزیابی می کند و توسط شبیه سازی ها و همچنین اجرای عملی بر روی متعادل کننده توپ و تیر (که به عنوان مثال کاربردی در نظر گرفته می شود) پشتیبانی می شود.
