
این دستورالعمل به شما نشان می دهد که روتر سی ان سی چگونه ساخته شده است. امیدوارم بتوانید از ساخت من الهام بگیرید و این آموزش برای پروژه های آینده شما مفید خواهد بود. این دستورالعمل تمام مراحل انجام شده در طراحی و ساخت این روتر سی ان سی را نشان می دهد.
چیزی که من در مورد یک روتر سی ان سی می خواهم این است که آن را بسیار متنوع است. شما می توانید از آن به عنوان یک ماشین حفاری، یک روتر، یک اره، یک کارخانه و حتی یک ماشین تراش استفاده کنید. از آنجا که کارگاه من بسیار کوچک است (بیشتر شبیه یک ورق است)، من برای این ابزارها اتاق نداشتم، اما هنوز می خواستم بتوانم قسمت های بسیار دقیقی را برای پروژه های مختلف ایجاد کنم. به همین دلیل است که من شروع به ساخت یک روتر سی ان سی کردم.
پس از انجام برخی تحقیقات، تصمیم گرفتم ماشین خودم را طراحی و ساخت کنم. تقریبا 6 ماه طول کشید تا ماشین را از ابتدا تا انتها ساخت و طراحی کرد. قبل از شروع طراحی واقعی دستگاه، تحقیقات زیادی در وب انجام دادم. من توصیه می کنم نگاهی به وب سایت های زیر داشته باشید: cncroutersource.com و cnczone.com . این وبسایت ها شما را با یک تن از اطلاعات و پاسخ به بسیاری از سوالات خود را در موضوعات مربوط به CNC پاسخ دهد.
لطفا توجه داشته باشید:
من این روتر سی ان سی را به عنوان پروژه نهایی برای مدرسه ساختم (همچنین به نام profielwerkstuk در هلند). وقتی که ساختم را شروع کردم، من 16 ساله بودم و زمانی که من 17 سال داشتم آن را تمام کردم. اگرچه من چند پروژه بزرگتر را در گذشته انجام داده ام و چندین سال است که رباتیک FTC را انجام می دهم، من آن را نداشتم تجربه بسیار با ساخت ماشین آلات CNC. این دستگاه در واقع دومین دستگاه CNC من ساخته شده است. اولین دستگاه یک دستگاه آزمایشگاهی چوبی بود که من برای کسب تجربه و کسب اطلاعات بیشتر در مورد دستگاه های CNC ساخته شدم. من سعی کردم این دستگاه را با بهترین امکانات، با ابزار، دانش و بودجه که در آن زمان داشتم، ساختم. من فکر می کنم دستگاه خیلی خوشگل بود و امیدوارم از خواندن درباره آن لذت ببرید.
مرحله 1: طراحی
قبل از شروع به ساخت یک ماشین، شما همیشه باید یک نوع طراحی داشته باشید. گاهی اوقات لازم است که برخی طرح ها بر روی یک قطعه کاغذ باشد، اما برای این دستگاه، طراحی دقیق تر سه بعدی ضروری بود. من طراحی خود را با استفاده از google sketchup ساختم sketchup Google یک برنامه CAD رایگان است که شما می توانید از وب دانلود کنید. من متوجه شدم که با آن کار بسیار آسان بود، هرچند من قبلا هرگز با برنامه Cad کار نکرده بودم. شما با استفاده از برنامه های دیگر مانند Autocad قادر نخواهید بود که طرح های پیچیده خود را همانطور که می توانید بسازید اما برای اهداف من کار درستی بود.
هدف اصلی من به دست آوردن تمام ابعاد مناسب برای قطعات من بود، به طوری که من می توانستم آنها را به صورت آنلاین سفارش دهم. من می خواستم ببینم آیا تمام اجزای من در کنار هم قرار می گیرند. از آنجا که دستگاه شامل بسیاری از قطعات متحرک است، من می خواستم اطمینان حاصل کنم که هیچ وقت در حال اجرا کردن دستگاه، هیچ وقت به یکدیگر ضربه نمی زد.
وقتی شروع به طراحی ماشین کردم، بعضی قطعات مانند ریل خطی و پیچ های توپ را داشتم. من این را از کسی خریدم که یک ماشین آزمایشی برای وب سایت خود ساخته بود. من از همین دستگاه برای این ماشین استفاده می کردم، همانطور که برای ماشین آزمایش قدیمی که قبلا ساخته بودم استفاده می شد.
این ها ابعاد و قطعات اصلی مورد استفاده برای دستگاه هستند:
ابعاد کلی
X: 1050 میلیمتر
Y: 840 میلیمتر
Z 400mm
مسافرت رفتن
X: 730 میلیمتر
Y: 650 میلیمتر
Z: 150 میلیمتر
طول ریل ها و پیچ های توپ بستگی به اندازه دستگاه شما می خواهید برای ساخت.
الکترونیک
– موتورها : 3 مگا پیکسل Nema 23 Stepper Motors و یا حتی یک کیت الکترونیک بهتر
– سوئیچ روشن / خاموش
– محافظ 18/4 سیم AWG
– سنسور مجاورت (سوئیچ محدود)
– منبع تغذیه 5V
– اسپیندل : Kress FME 800 یا Bosch Colt یا روتر Compact روتر Dewalt
اگر شما همچنین می خواهید آلومینیوم و سایر فلزات غیر آهنی را برش دهید، یک اسپیندل آب سرد یا هوا خنک می شود بسیار بهتر است. شما می توانید یک کیت را که شامل همه چیزهایی است که می خواهید خریداری کنید. من بعد از اتمام کار CNC، این را به عنوان ارتقاء خریدم
اختیاری:
– محوطه الکترونیک
– زنجیره انرژی
– اتصالات
مکانیکی
– ریل خطی : X: SBR 20 Y / Z: SBR 16
– Ballscrews: X / Y: زمین 16mm 5mm
شما می توانید مقدار زیادی پول را با خرید یک کیت که شامل ریل های خطی و پیچ های توپ است، ذخیره کنید .
– Z- axle drive screw : M10 با مهره دلریو خانگی، اما یک پیچ توپ بهتر می شود
– پروفیل های آلومینیومی : 30 / 60mm Misumi 100mm
– صفحات آلومینیومی : ضخامت 15 میلی متر
– نرم افزار CAD / CAM: CamBam
– نرم افزار کنترل: Mach3
این دستگاه تقریبا به طور کامل از صفحه آلومینیومی ضخامت 15 میلیمتر و اکستروژن آلومینیوم 30×60 میلی متری ساخته شده است. من روتر سی ان سی را با استفاده از مقدار بسیار محدودی از ابزارها ساخته ام. ابزار اصلی من یک مطبوعات مته و یک ماشین تراش بود. از آنجا که من ابزار مناسب برای برش صفحات آلومینیومی به اندازه نداشتم، دستگاه را در حدود اندازه های استاندارد طراحی کردم و صفحات آنلاین را سفارش دادم، که قبلا به طول آنها قطع شده بود. اکستروژن آلومینیومی که من استفاده کردم نیز به طول بریده شد و من این دستور را از misumi اروپا اروپا .
هنگام طراحی یک روتر سی ان سی مفید است که از چند سوال خودتان بپرسید. در اینجا شما می توانید روند طراحی من برای روتر سی ان سی من را پیدا کنید.
چه نوع روتر سی ان سی شما می خواهید ساخت؟
اساسا دو نوع روتر سی ان سی وجود دارد: طراحی میز متحرک و طراحی فرعی حرکتی. طراحی سبک های میز متحرک اغلب برای روترهای سی ان سی کوچکتر استفاده می شود. آنها ساده تر ساختن هستند و می توان آنها را سخت تر از یک ماشین سبک گابریل متحرک ساخت. ناکامی در این که جدول به جایی می رود که حرکت کند، این است که ریزش کلی دستگاه در گذشته به نظر می رسد تا حدودی دو برابر بزرگتر از یک طراحی متحرک است. بنابراین، احتمالا بهتر است که یک ماشین سبک رو به جلو حرکت کنید، اگر پاکت برش بزرگتر از 30×30 سانتیمتر باشد. از آنجا که من می خواستم یک ماشین با یک پاکت برش حدود 65×65 سانتیمتر بسازم، از سبک سبک حرکت بلبرینگ استفاده کردم.
با روتر سی ان سی چه میخواهید؟
این تقریبا هر پاسخ به سوالات زیر را تعیین می کند. من می خواستم از ماشین برای تخته سه لا، چوب سخت و پلاستیک به طور عمده، بلکه برای آلومینیوم استفاده کنم. اگر می خواهید مواد را سخت تر از آلومینیوم بریزید، من توصیه می کنم ساخت یک کارخانه CNC ، به جای یک روتر.
چه موادی برای ساختن دستگاه استفاده می کنید؟
این مسئله مطابق با سوال فوق تعیین می شود. یک راهنمای خوب این است که مواد مورد استفاده برای ساختن دستگاه قوی تر یا قوی تر از مواد مورد نظر شما می باشد. بنابراین اگر می خواهید آلومینیوم را برشید، باید از ماشین آلومینیوم یا حتی فولادی استفاده کنید. من روتر های سی ان سی چوبی را می بینم که می توانند آلومینیوم را قطع کنند (برخی از آنها در یوتیوب پیدا خواهند شد)، اما این بسیار آرام بود و ماشین ها باید به خوبی ساخته شوند. از آنجا که من می خواستم آلومینیوم را با این روتر سی ان سی برش دهم، آن را از آلومینیوم ساختم. من می توانستم از فولاد استفاده کنم، اما این ماشین سخت تر است و من ابزار مناسب برای آن ندارم.
چه مدت سفر برای هر محور نیاز دارید؟
اولین قصد من ساخت روتر سی ان سی بود که بتواند محصولات ورق های استاندارد مانند تخته سه لا و MDF را اداره کند. در هلند این 62 × 121 سانتی متر است. بنابراین برای محور Y، من می خواستم فاصله سفر حداقل 620mm باشد. این دستگاه در یک حیاط کوچک در حیاط خلوت من قرار دارد و مقدار فضای بسیار محدودی دارد. من نمی توانم دستگاه را بیش از حد بزرگ کنم، زیرا پس از آن واقعا می شود در راه و تمام فضای. بنابراین محور X تنها 730 میلی متر سفر دارد. این کمتر از طول کامل یک ورق تخته سه لا (1210 میلی متر) است، اما من فهمیدم که اگر من بخواهم چیزی واقعا بزرگ بچینم، می توان اولین بخش را برداشت، تا اینکه اسلاید را به جلو بریزم و بخش آخر را بردارم. با استفاده از این تکنیک می توانید قطعه هایی را که بسیار بزرگتر از فاصله X-travel طبیعی هستند برش دهید. برای محور Z من متوجه شدم که 150 میلیمتر برای استفاده از چهار محور در آینده کافی خواهد بود.
چه نوع حرکت خطی برای دستگاه استفاده می کنید؟
گزینه های زیادی برای انتخاب خطی وجود دارد: اسلاید کشویی، یاطاقان توپ بر روی ریل V، یاطاقان V-way، خطی خطی پشتیبانی نشده، به طور کامل پشتیبانی ریل خطی دور و خط خطی مشخصات. سیستم حرکتی خطی که استفاده می کنید تا حد زیادی تعیین کیفیت برش را که می توانید به دست آورید تعیین کنید. من توصیه می کنم برای بهترین سیستم که می توانید هزینه آن را. پس از انجام برخی تحقیقات، متوجه شدم که ریل خطی به طور کامل پشتیبانی می شود بهترین گزینه است، که من هنوز می توانستم هزینه کنم. اگر در eBay یا آمازون برای SBR12، SBR16 یا SBR20 جستجو کنید، تعدادی از فروشندگان و مجموعه های مختلف را برای انتخاب آن پیدا خواهید کرد. اگر شما در حال ساخت یک روتر CNC 3 محور هستید، شما باید یک کیت شامل سه مجموعه ریل های خطی و دو یاطاقان خطی در هر مسیر خریداری کنید.
چه نوع سیستم رانندگی خطی برای هر محور استفاده می کنید؟
گزینه های اساسی برای رانندگی هر محور عبارتند از: تسمه های زمان بندی، رینگ و پین کن و راننده پیچ. برای روترهای خانگی CNC، پیچ های درایو بیشتر استفاده می شود. سیستم های دنده پیچ با قرار دادن مهره ثابت در قسمت متحرک دستگاه و نگه داشتن پیچ در محل در هر دو ends.The پیچ به موتور متصل می شود. اگر موتورها شروع به چرخش کنند، مهره با بخش متحرک دستگاه متصل به آن، در امتداد پیچ حرکت می کند و دستگاه را در حرکت می گذارد.
برای محور X و Y، از پیچ های توپ استفاده کردم. پیچ های توپ باعث حرکت بسیار صاف و تقریبا هیچ واکنشی نیست. Backlash مقدار بازی بین پیچ و مهره ی درایو و چیزی است که شما در روتر سی ان سی نمی خواهید. اگر میخواهید بیشتر در مورد پاسخگویی صحبت کنید، توصیه میکنم نگاهی به وب سایت cncroutersource.com بیاندازید .
پیچ های توپ گران تر از پیچ های ACME (که یک جایگزین خوب هستند)، اما دوباره سرعت برش و کیفیت برش را که می توانید تحقق بخشید، بسیار بهبود می بخشد.
برای محور Z، از میله های فولادی ضد زنگ M10 با کیفیت بالا با مهره دل ریز استفاده می شود.
چه نوع از موتور درایو و کنترلر می خواهید استفاده کنید؟
در مورد موتورها، دو گزینه اساسی وجود دارد: موتور سروو و موتور پله.
موتور سروو به طور عمده برای روترهای سی ان سی بالا استفاده می شود و بسیار گران است. آنها از رمزگذاران برای ارائه بازخورد موقعیتی و نیاز به کنترلرهای گرانتر استفاده می کنند. موتورهای قدم به قدم به طور گسترده ای در روتر های خانگی سی ان سی استفاده می شوند و انواع و اندازه های مختلفی وجود دارد. اندازه موتور موتور پله شما بستگی به آنچه شما می خواهید برش، چقدر سریع می خواهید آن را برش، چه نوع از درایو خطی و اجزای حرکت شما استفاده می کنید، چه دستگاه بزرگ است و غیره. من از موتور 3Nm stepper برای ماشین من استفاده ، که احتمالا بیش از حد است.
کنترل کننده باید با موتور مورد استفاده شما برخورد کند. شما می توانید از موتورهای شخصی برای هر موتور استفاده کنید، همانطور که من انجام دادم، یا می توانید یک هیئت مدیره 3 یا 4 محور را خریداری کنید. شما می توانید اطلاعات بیشتر در مورد الکترونیک مورد استفاده در مرحله 14 را بخوانید.
چه نوع اسپیندل شما استفاده می کنید؟
بیشتر روترهای خانگی سی ان سی با استفاده از یک روتر معمولی چوبی یا روتاری ترتیبی به عنوان اسپیندل برش برای ماشین خود استفاده می کنند. معدن بدون استثنا است من از یک روتر Kress استفاده می کنم که کمی بالاتر از روتر های استاندارد چوب است و دارای فلنج مهره ای 43 میلی متری است. اگر می خواهید بسیاری از مواد مختلف را برشید، برخی از نوع کنترل سرعت می تواند مفید باشد. روتر Kress دارای کنترل سرعت ساخته شده است، اما شما در بیشتر روتر ها آن را پیدا خواهید کرد. اگر قصد دارید تا بسیاری از برش واقعا سنگین را انجام دهید، ممکن است بخواهید به اسپیندل های هوا یا آب سرد نگاه کنید. شما می توانید این را در آمازون / ای بی پیدا کنید، اما آنها به شما هزینه بسیار بیشتر از یک روتر استاندارد هزینه. آنها از کنترل VFD برای کنترل سرعت استفاده می کنند و می توانند خیلی روتر از روترهای معمولی باشند.
هزینه های کل ماشین چیست و آیا می خواهم پول زیادی را صرف کنم؟
من هزینه کل این روتر سی ان سی را حدود 1500 یورو تخمین زده ام. روتر سی ان سی گران است اما شما می توانید با ساختن یک خودتان، پول زیادی صرفه جویی کنید.
پس از پاسخ به تمام سوالات بالا متوجه شدم که طراحی نهایی روتر سی ان سی من است. همانطور که می بینید، طراحی من بسیار دقیق نیست. به عنوان مثال، مکان های دقیق سوراخ را در همه قسمت ها مشاهده نخواهید کرد. دقت کنید که چقدر از پیچ ها استفاده کنید تا دو قطعه را با هم ترکیب کنید، اگر قبلا هرگز این قطعات را در دستان خود نگه نداشتید.
برای من، این طرح کافی بود تا دیدگاه خوبی در مورد چگونگی کار همه چیز داشته باشم و بخشی را که باید سفارش دهم، به من نشان داد.
پس از پایان طراحی و تعدیل دوباره / طراحی مجدد، من می توانم شروع به سفارش تمام قطعات مورد نیاز. اکستروژن آلومینیوم 30×60 میلیمتر و تمام صفحات آلومینیومی برای فرعی و محور Z که برای محور X استفاده می شد از قبل به طول برش داده شد. من همچنین برخی از پا بر روی مقیاس ضد ارتعاش سنگین را سفارش دادم.
مرحله 2: محور X
محور X شامل یک قاب پایه است که از 4 قطعه 30/60 اکستروژن آلومینیومی و دو ضخامت 15 میلی متر ضخامت تشکیل شده است. دو سوراخ 6.8 میلیمتر در انتهای اکستروژن وجود دارد. من یک شیر فلزی برای ایجاد یک thread M8 در داخل سوراخ استفاده کردم. پس از آن، من به دقت موقعیتهای سوراخهای روی صفحات پایان را گذاشتم. من در حین حفاری هر دو صفحات را محکم گرفتم تا مطمئن شوید که سوراخ ها در هر دو طرف به هم متصل می شوند. من همچنین چهار سوراخ در وسط هر صفحه برای نصب بلوک های تحمل حفاری. من چهار سوراخ اضافی در یکی از صفحات جانبی حفاری کردم تا بتوانم سوار موتور بشوم.
من 4 بلوک برای نگهداشتن پاهایشان ساختم. بلوک ها قطعه آلومینیوم (50x50x20) است. من از چهار پیچ و مهره M5 و T-آجیل برای نصب آنها بر روی اکستروژن بیرونی استفاده کردم.
ریل خطی مستقیم بر روی اکستروژن آلومینیوم قرار می گیرد. برای محور X من از ریل قطر 20 میلیمتر استفاده کردم. سوراخ هایی که پیش از حفاری در پایه ریل های خطی قرار دارند دقیقا با اسلات در اکسترود های آلومینیومی قرار دارند. من به راحتی می توانم آنها را با استفاده از پیچ و مهره M5 و T -Nuts سوار کنم.
مرحله 3: صفحات جانبی گاردی
صفحات جانبی زیرین تقریبا یکسان هستند. تنها تفاوت این است که یکی از آنها دارای چهار سوراخ اضافی برای اتصال Motormount است. کل فرعی از صفحات آلومینیومی با ضخامت 15 میلی متر ساخته شده است. حفاری سوراخ ها در سمت چپ، کاملا ساده بود. اگر چه من مجبور بودم خیلی دقیق کار کنم. برای گرفتن سوراخ دقیقا در نقطه راست، من به دقت مکان های خود را مشخص کرد، سپس من یک پانچ مرکزی ، برای ایجاد یک تقلید کوچک استفاده می شود. سپس من به مطبوعات مته رفتم و از یک مته مرکز استفاده کردم تا سوراخ ای ایجاد کنم که بیت واقعی را هدایت کند. برای سوراخ های بزرگتر، قبل از استفاده از بیت مته نهایی، ابتدا یک مته کمی کوچکتر استفاده کردم.
به دلیل اینکه من تاج و تخت را طراحی کرده بودم، مجبور بودم سوراخ هایی را در چهره های انتهایی ورق های جانبی بچرخانم. من در ابتدا برنامه ای برای انجام این کار در مطبوعات مته، اما قطعات زیر آن متناسب نیست. بنابراین من مجبور بودم راه حل دیگری پیدا کنم: با استفاده از ماشین تراش. من یک نگهدارنده ویژه در حمل و نقل ماشین تراش ساخته شده است. من هر سوراخ اضافی را در هر صفحه حفاری کردم تا آنها را در جای خود نگهداری کنم. حالا من می توانم به راحتی حفره های کامل در انتهای صفحات جانبی حفاری. تنها چیزی که قرار بود انجام شود، حفره هایی برای یک موضوع M8 بود.
مرحله 4: مونتاژ گانتری
بقیه فرعی همانند صفحات جانبی ساخته می شوند. سخت ترین قسمت گرفتن خطوط خطی به درستی بود. ریل خطی باید با لبه ورق هماهنگ باشد. هنگام مارک گذاری مکان های دقیق سوراخ، من دو قطعه از پروفیل های آلومینیومی را به سمت دو طرف بچسبانید تا ریل ها را دراز بکشم. هنگامی که مکان های سوراخ را مشخص می کردم، آنها را با موضوع M5 حفر کردم و با آنها تماس گرفتم. هنگام اتصال ریل ها به فرمان، شما باید اطمینان حاصل کنید که فاصله بین ریل ها در طول تمام طول به طور کامل حتی (ریل ها باید موازی باشند).
من همان روش را برای حفاری سوراخ ها در چهره های پایانی به کار گرفتم، همانطور که با صفحات جانبی انجام دادم.
من بعضی از گوشه های گوشه ای را برای افزودن سفتی اضافی به مونتاژ ساختم. در مونتاژ نهایی دستگاه، من واقعا آنها را ترک کردم، چون احساس نکردم که مورد نیاز بودند.
بشقاب در پایین فرمان بسیار ساده است. من 6 سوراخ را برای اتصال آن به صفحات جانبی حفاری کردم. در وسط، من باید دو سوراخ برای نگهداشتن مهره مهره ای بچسبانم.
مرحله 5: محور Y محور
حامل محور Y شامل یک صفحه با 8 بلبرینگ خطی متصل به آن می شود. حفاری سوراخ ها کاملا به جلو بود، اما مجددا باید بسیار دقیق باشد. هر دو یاتاقان خطی برای محور Y و محور Z به این صفحه متصل می شوند. از آنجا که یاتاقان ها خیلی نزدیک هستند، حتی کوچکترین عدم تعادل باعث می شود آن را مربا. من سوراخ ها را فقط 0.2 میلی متر بزرگتر ساختم، اما من مجبور بودم آنها را به 0.5 میلی متر متصل کنم تا بلبرینگ را به درستی مرتب کنند. من مجبور شدم کمی کم کاری انجام دهم تا بتوانم حمل را به راحتی از یک طرف به سمت دیگر اسلاید کنم. هر دو ریل و بلبرینگ نیاز به تنظیم داشتند. من از callipers های با کیفیت بالا استفاده می کنم تا آنها را به بهترین شکل ممکن هماهنگ کنند. وقتی که من چرخش محور چرخش را برای محور Y ساخته بودم، دو سوراخ اضافی را در صفحه به آن وصل کردم. من همچنین سعی کردم که محور زاویه را تا حد امکان محکم کنم، اما هنوز مجبور شدم آنها را تنظیم کنم، وقتی که بقیه محور Z را به پایان برسانم.
مرحله 6: محور Z
ریل خطی Z-axis به قسمت حرکتی مونتاژ محور Z متصل می شود. ریل ها نیاز به جابجایی چند میلی متر از لبه صفحه داشتند. من از همان روشی که برای محور Y انجام دادم استفاده کردم تا آنها را هماهنگ کنند. من دو قطعه پلاستیکی از ضخامت درست پیدا کردم که می توانم به عنوان اسپارک استفاده کنم. من می دانستم که لبه های صفحه آلومینیومی موازی هستند، بنابراین من دو قطعه آلومینیومی را به لبه صفحه بستم و قطعه های پلاستیکی را به فضا گذاشتم که ریل ها را از لبه خارج کنند. هنگامی که مکان های سوراخ را مشخص می کردم، دوباره حفاری می کردم و به آنها ضربه زدم. اطمینان حاصل کنید که شما قطعات کامپوزیت را علامت گذاری می کنید، به طوری که حفره ها همچنان در کنار یکدیگر قرار می گیرند.
برای نصب ورق بالا به مونتاژ محور Z، در انتهای ورق نصب روتر، سه سوراخ حفاری و حفاری کردم. همانطور که برای صفحات محور Y انجام دادم، این کار را با همان تنظیم روی ماشین تراش انجام دادم. من در ابتدا برنامه ریزی کردم که موتور موتور پله ای Z را مستقیما به صفحه بالا وصل کنم. بنابراین من سعی کردم که برخی از اسلات ها را در صفحه بالا ببرم تا موتور Stepper را ببندم. این خیلی خوب کار نمی کرد، چون من یک دستگاه فرز درست نداشتم. بنابراین من بخشی را با اسلات قطع کردم و یک موتور دیگر را از پلاستیک ساختم (به مرحله 12 مراجعه کنید).
من همچنین دو بلوک بلبرینگ را از همان مواد پلاستیکی ساخته بودم که به بالای صفحه نیز متصل بود. پیچ درایو یک تکه از میله رول فولادی ضد زنگ (M10) است. پیچ درایو بین دو یاتاقان با دو آچار است. من یک قرقره زمانبندی را برای یک موضوع M10 حفر کردم و به آن ضربه زدم و آن را فقط بر روی قسمت بالای پیچ درایو پیچیدم. این توسط سه پیچ تنظیم شده است. مهره گیر Delrin به محور محور Y متصل می شود (مرحله 10 را ببینید).
کیت روتر از پیش ساخته شد و من آن را از damencnc.com سفارش دادم. این یک حلقه اتصال 43 میلی متری است که به روتر Kress که من از آن استفاده میکنم متناسب است.
اگر میخواهید به جای ارتقا به عنوان یک اسپیندل آب سرد استفاده کنید، کیت اغلب در کیت قرار دارد. اگر میخواهید از یک روتر دووال یا بوش با یک بدن استوانه ای استفاده کنید، می توانید این مونتاژ ها را نیز خریداری کنید.
گام 7: کمربندهای Timing و Bulleys
من نمی خواستم موتورها از دستگاه خارج شوند. از آنجا که این امر می تواند اندازه کلی دستگاه را در حدود 15 سانتیمتر در هر محور افزایش دهد. به طور معمول، موتورها را در خارج از دستگاه با استفاده از یک سوپاپ مخصوص موتور یا ایستادگی می کند. به این ترتیب شما می توانید موتورها را به طور مستقیم به پیچ های توپ با یک جفت کننده انعطاف پذیر از نوع خاصی متصل کنید. این همان چگونگی انجام این کار روی اولین ماشین مجتمع چوبی من ساخته شده است. برای اکثر مردم این احتمالا درست کار خواهد کرد. اما آنچه که من پیدا کردم این بود که به دلیل اینکه ماشین در یک فروشگاه بسیار کوچک قرار داده شده، موتورها واقعا در مسیر راه می افتند. از آنجا که آنها تقریبا 20 سانتیمتر بودند (منجر به حرکت موتور)، من اغلب در برابر آنها ضربه زده می شود.
به همین دلیل من موتورها را در داخل دستگاه جدید قرار دادم. با این کار من نمی توانستم به طور مستقیم دو موتور را به پیچ های توپ متصل کنم، اما مجبور بودم از کمربند و گیره های زمان استفاده کنم.
من دستور beltingonline.co.uk را به کمربند و گیره های زمان بندی سفارش دادم . آنها دارای انواع مختلفی از انواع و اندازه هستند. من از کمربند و تسمه HTD5 عرض 9 میلیمتری استفاده کردم. هنگام استفاده از یک درایو کمربند برای اتصال موتور خود به پیچ دنده، می توانید از کاهش دنده استفاده کنید. با استفاده از یک دنده کوچکتر در موتور، می توانید از موتورهای کوچکتر استفاده کنید و همچنان یک گشتاور مشابه (البته البته از دست دادن سرعت). از آنجا که موتورهای من خیلی بزرگ بودند، برای کاهش قدرت بیشتر نیازی به کاهش دنده نبود.
برای صرفه جویی در پول، من قطارهای زمانبندی را بدون سوراخ برای set screws و فقط یک سوراخ خلبان در مرکز دستور دادم. من ماشین تراش را برای حفاری سوراخ به اندازه درست استفاده کردم. برای حفاری سوراخ برای set screws، من از یک ورق شش ضلعی فولادی با استفاده از تراش و drillpress از یک جیگ کوچک استفاده کردم.
گام 8: نصب موتور
مونتاژ موتور از قطعات لوله آلومینیومی ساخته شده است. من زمانی که من به آنها دستور دادم، پیش از آن به اندازه کشیده شدم، اما شما همچنین می توانید از یک لوله فولادی استفاده کنید و آن را به قطعات مربع بریزید. مونتاژ موتور برای X و محور Y، باید قادر به حرکت در داخل و خارج، برای کشیدن کمربندهای زمان بندی باشد. اگر از متصل کننده معمولی برای اتصال موتورهای پله ای خود استفاده می کنید، من پیشنهاد می کنم خرید یا خرید برخی از standoffs. من از ماشین تراش برای ساختن اسلات و حفاری بزرگ در یک چارچوب سوار استفاده کردم، اما شما همچنین می توانید این کار را با یک مته متداول انجام دهید.
من با ساخت یک سوراخ بزرگ در یک طرف کوه با یک سوراخ آغاز کردم. این به موتور اجازه می دهد تا با سطوح شستشو داده شود و همچنین شفت را محور قرار می دهد. این موتور با چهار پیچ M5 متصل به سوار است. من چهار اسلات را در طرف دیگر کوه ساخته ام تا بتوانم داخل و خارج آن را اسلاید کنم. من قطعه را روی یک پیوند مخصوص تراش قرار دادم تا چهار اسلات را میل کنید.
مرحله 9: بلوک تحمل
بلوک های بلبرینگ برای محور X و Y از ورق آلومینیومی 50 میلی متری ساخته شده اند. من چهار تخته مساوی را با ضخامت 15 میلیمتر قطع کردم. من بعد از هر طرفی از سوراخ های روی ماشین تراشیدم. بعد از مارک کردن و حفاری چهار سوراخ نصب، من دوباره از ماشین تراش استفاده کردم تا سوراخ بزرگ در مرکز خالی حفاری شود. سپس حفره را برای تحمل به داخل ساختمان گذاشتم. یاتاقان باید درون فشرده شود و بلوک ها بر روی صفحات پایان و جانبی بولد شوند. من در انتهای پیچ های پیچ حفره ای و حفره ای را برای نگه داشتن آنها در محل حفاری کردم. با قرار دادن یک پیچ، می توانم آن را در برابر یاتاقان های زاویه ای تماس بگیرم. پایان پیچ توپ بر روی تراش به 11 میلی متر برسد. این بخشی است که قرقره زمانبندی به آن متصل می شود. پایان انتهای پیچ توپ کمی بیشتر به 10 میلی متر برسد، به طوری که می توان آن را بر روی بلبرینگ فشار داد. در انتهای شناور پیچ های توپ، من فقط از بلبرینگ استاندارد استفاده می کردم.
مرحله 10: محور چرخ محور Z محور
من از یک پیچ توپ برای محور Z استفاده نکردم. در عوض من از میله رشته ای استاندارد، اما با کیفیت M10 استفاده کردم. من یک قطعه دلرین را برداشتم. Delrin یک ماده بسیار خوبی برای این منظور است، زیرا آن را خود روانکاری است و در طول زمان از بین نمی رود. اگر با استفاده از شیر با کیفیت خوب برای ایجاد موضوعات در مهره، پاسخگویی بسیار کم باشد (من هرگز متوجه نشده ام). در داخل مونتاژ محور Z، مکان بسیار کمی برای نصب مهره وجود دارد. و از آنجا که مهره های خانگی من دور بود، من نیاز به یک کوه خاص. کوه شامل دو قطعه 12 میلی متر اکریلیک است. من قادر به استفاده از روتر سی ان سی خانگی از معلم مدرسه من بود، برای ساخت این قطعات. مهره دور بسیار پیچیده در داخل قطعات آکریلیک قرار دارد و توسط یک پیچ کوچک نگه داشته شده است. پیچ پیچ را از چرخش در داخل کوه نگه می دارد. من در دو پایه ی نگهدارنده دو سوراخ حفاری کردم و دوش گرفتم تا بتوانم آن را به حامل محور Y وصل کنم
گام 11: کوه هیدرولیک درایو X و Y
برای محور X و Y، یک قطعه از آلومینیوم را از یک درایو مختلف استفاده کردم. آجیل گلوله دارای دو فلنج کوچک در یک طرف و سه سوراخ در آنها است. من از یکی از سوراخ ها در هر طرف برای اتصال مهره به نگهدارنده استفاده می کردم. دارنده از یک قطعه آلومینیوم ساخته شده و بر روی ماشین تراش ماشینکاری می شود. از آنجا که من یک کارخانه نداشتم، من از ماشین تراش با چهار چاک فک استفاده می کردم. این قطعات باید بسیار دقیق به کار گرفته شوند. هنگامی که آجیل ها را به زیر بغل و محور محور Y متصل می کنید، می توانید این قطعات را به راحتی از یک طرف به سمت دیگر حرکت دهید، با چرخاندن توپ به صورت دستی. اگر ابعاد نگهدارنده ها نادرست باشد، مهره گیر می شود و شما دیگر نمی توانید چرخ دستی را با دست بچرخانید.
گام 12: کوه موتور محور Z
سوار موتور محور Z متفاوت از دیگران است. این از جنس اکریلیک 12 میلی متر ساخته شده است و همچنین از روتر خانگی من از معلم من برداشته شده است. من در ابتدا برنامه ریزی کردم که از یک صفحه از آلومینیوم کوه بیرون بریزم، اما ماشینکاری که خیلی دشوار بود. تنش کمربند را می توان با دوش پیچ و مهره بالا و کشیدن کل موتور سوار مونتاژ تنظیم کرد. آکواریوم 12 میلیمتری فقط در حال حاضر خوب است، اما من ممکن است آن را با یک قطعه آلومینیومی در آینده جایگزین کنم. متوجه شدم وقتی که کمربند را کشیدم، پلاک اکریلیک کمی خم شد.
مرحله 13: تخت برش
بخش نهایی من مجبور شدم برای ماشین بچرخد. تخت برش بخش مهمی از دستگاه است و اغلب نادیده گرفته می شود. انواع مختلف تخت برش وجود دارد. مثالها: میز میز T-slot، میز میز سوراخ شده، جدول خلاء یا شما می توانید از بالای میز یکبار مصرف استفاده کنید و سهام خود را به سمت راست بر روی میز بچرخانید. میز تبلت آلومینیومی احتمالا بهترین است، اما بسته به اندازه دستگاه شما چند صد دلار هزینه خواهد کرد. من انتخاب کردم از tabletop سوراخ شده، چرا که آن را در بودجه من نصب شده و من هنوز هم بسیاری از گزینه های بستن.
تخت برش برای ماشین من، از یک تکه چوب ضخیم 18 میلی متر ساخته شده است. من آن را با پیچ و مهره M5 و آجیل t-slot به اکستروژن آلومینیوم وصل کردم. من حدود 150 عدد شش ضلعی M8 برای حدود 4 دلار خریدم. با استفاده از یک برنامه CAD، شکل شش ضلعی را در یک شبکه با یک سوراخ در وسط شکل گرفتم. سپس از دستگاه برای برداشتن همه جیب برای آجیل استفاده می کنم. به جای عادت های منظم، شما همچنین می توانید از T-nuts استفاده کنید، اما بعد از آن شما باید تبلت را برای تزیین آنها تلنگر کنید. مشکل دیگری که می توانید داشته باشید این است که آنها از بین می روند.
در بالای تخت تخته سه لا توس، من یک تکه MDF ضخیم 25mm نصب کردم. این سطح یکبار مصرف است. من از یک روتر بزرگتر استفاده کردم، برای قطع حفره ها از طریق هر دو قطعه. سوراخ ها دقیقا با مرکز شکل های شش ضلعی که قبلا مرتب شده اند درست می شوند. سپس من تکه ای از MDF را باز کردم و تمام آجیل را در یک تخته سه لا نصب کردم. من سوراخ های کوچکی را ساخته بودم، بنابراین مجبور شدم از یک چکش استفاده کنم تا آنها را درون خود بچرخانم. سپس سطح MDF را دوباره نصب کردم و اگر هم درست بود، بررسی می شد.
من همچنین تبلت را صاف کردم تا اطمینان حاصل شود که سطح موازی با محور x و y و کاملا مسطح باشد.
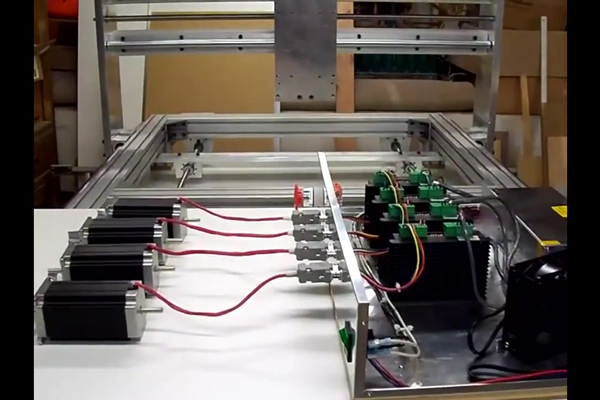
مرحله 14: الکترونیک
الکترونیک برای دستگاه من شامل اجزای زیر است:
منبع تغذیه اصلی – 48 ولت 6،6 آمپر
3 درایور – Leadshine M542 V2.0
3 مرحله موتور – 3 مگاوات هیبریدی Nema 23
شکست خورده
رله – خروجی 25A، 230VAC، ورودی 4-32VDC
سوئیچ قدرت اصلی
منبع تغذیه برای breakoutboard – 5VDC
منبع تغذیه برای خنک کننده – 12VDC
2 فن خنک کننده (80 میلیمتر)
2 پریز برق – برای روتر Kress و فروشگاه va
E- توقف – هنوز باید نصب شود
محدود کردن سوئیچ ها – هنوز هم باید نصب شود
این یک کیت الکترونیک خوب است:
3 محور Nema 23 کیت موتور پله
اگر شما نمی خواهید پول زیادی را در الکترونیک صرف کنید، می توانید یک کیت از آمازون خریداری کنید. تعداد زیادی از فروشندگان مختلف با قیمت در محدوده 200-400 دلار وجود دارد. قبل از سفارش دادن یک کیت، شما باید در مورد آنچه که نیاز به استپرس دارید، فکر کنید. من شما را در حال ساخت یک ماشین کوچک برای برش چوب و پلاستیک تنها 270 اونس یا 1.9 Nm موتور به شما مقدار زیادی از قدرت را می دهد. من موتور 3 نانومتر را انتخاب می کنم، زیرا ماشین به اندازه کافی بزرگ و سنگین است و من در زمینه ماشینکاری مواد سخت تر مانند آلومینیوم در آینده برنامه ریزی کردم.
اگر موتورهای شما خیلی بزرگ نیست، می توانید از یک راننده راننده 3 محور استفاده کنید، اگرچه بهتر است از درایورهای شخصی استفاده کنید. رانندگان فردی می توانند از آمپرس های بیشتر و ویژگی microstepping برخوردار باشند. آنها قابل اعتمادتر هستند و به شما نتایج خوبی خواهند داد. درایورهایی که من استفاده میکنم، با کیت من سفارش دادم. آنها می توانند حداکثر 4،2 آمپر و حداکثر 125 میکرو ثانیه را اداره کنند.
منبع تغذیه اصلی به رانندگان با 14 سنج سنج متصل است، که عمدتا در هواپیما RC استفاده می شود. این سیم بسیار انعطاف پذیر است، اما با کیفیت بالا و می تواند مقدار زیادی از آمپر. منبع تغذیه 5 ولت به برق اصلی وصل شده است. برای طرفداران خنک کننده، یک منبع برق را داخل محفظه نصب کردم، به طوری که می توانم از یک آداپتور دیواری استاندارد 12V برای استفاده از آنها استفاده کنم. قدرت اصلی توسط یک سوئیچ قدرت بزرگ روشن و خاموش می شود.
رله 25A توسط کامپیوتر از طریق breakoutboard کنترل می شود. پایانه های ورودی رله به پایانه های خروجی خروجی وصل می شوند. رله به دو منبع تغذیه متصل شده است، که روتر Kress را خاموش می کند و مغناطیسی را خنک می کند تا لرزش ها را لمس کند. هنگامی که Gcode با دستور M05 به پایان می رسد، دستگاه به طور خودکار هر دو Shop vaw و روتر را تغییر می دهد. برای تغییر آنها بر روی شما می توانید F5 را فشار دهید یا از دستور Gcode M03 استفاده کنید.
گام 15: محوطه الکترونیک
از آنجایی که من به طور موقت الکترونیک را در یک قطعه چوب نصب کردم، برای آزمایش دستگاه، من هنوز مجبور بودم یک محفظه خوب ایجاد کنم. من ابعاد و مکان های خشن برای تمام اجزای یک قطعه کاغذ را برداشتم. من سعی کردم آنها را به گونه ای تنظیم کنم که بتوانم به راحتی به تمام ترمینال ها برای نصب سیم ها دسترسی پیدا کنم. من همچنین اطمینان دادم که من از جریان محفظه جریان هوا کافی دریافت می کنم. این بسیار مهم است زیرا کنترل کننده های پله می توانند کاملا گرم شوند.
همه کابل ها را می توان در پشت محفظه متصل کرد. از جعبه های ویژه 4 سیم استفاده کردم، زیرا می خواستم بتوانم الکترونیک را از دستگاه جدا کنم، بدون نیاز به باز کردن هر یک از ترمینال های سیم. من همچنین دو پریز برق را برای تأمین برق به اسپیندل و یک shopvac نصب کردم. رسانه های برق به رله متصل می شوند تا به صورت خودکار در Mach3 به طور خودکار روشن و خاموش شود. من یک سوکت بزرگ روی جلوی محوطه نصب کردم.
هنگامی که تمام اجزاء را که من می خواستم مرتب کردم، تمام قطعات را طراحی کردم تا محوطه را با یک برنامه CAD طراحی کنم. سپس ماشین خود را با استفاده از دستگاه سی ان سی به کلی از دو طرف و پایه برداشتم. من یک تکه تکه تکه ای از وسط گذاشتم. سپس تمام قطعات را نصب کردم و سعی کردم سیم کشی را تا حد امکان تمیز نگه دارم.
مرحله 16: نرم افزار CNC
برای کنترل روتر سی ان سی، شما نیاز به 3 نوع نرم افزار مختلف دارید. یک برنامه CAD برای ایجاد نقاشی. یک برنامه CAM برای ایجاد صفحات ابزار و خروجی G-code. و یک برنامه کنترل کننده که G-code را ترجمه می کند و روتر را کنترل می کند. من با استفاده از CamBam برای ایجاد بیشتر نقاشی های من و ایجاد مسیرهای ابزار. CamBam یک برنامه ساده است و با کار بسیار آسان است. این دارای برخی از ویژگی های CAD اولیه است، بنابراین برای اکثر پروژه های شما به یک برنامه CAD دیگر نیازی ندارید. قبل از اینکه CamBam بتواند مسیرهای ابزار ایجاد کند، شما باید چند پارامتر را تنظیم کنید.مثالها عبارتند از: قطر ابزار که شما استفاده می کنید، عمق برش، عمق بر حسب گذر، سرعت برش و غیره هنگامی که خطوط ابزار را ساخته اید، می توانید کد G را بیابید. G-code زبان ماشینکاری است که به دستگاه می گوید چه کاری باید انجام دهد.
برای استفاده از نرم افزار کنترلر Mach3 استفاده می شود . Mach3 سیگنال ها را از طریق پورت موازی کامپیوتر شما به هیئت مدیره شکست می فرستد. از Mach3 از ابزار برش صفر استفاده کنید و برنامه برش را شروع کنید. شما همچنین می توانید از آن برای کنترل سرعت اسپیندل و سرعت برش استفاده کنید. Mach3 دارای برخی از جادوگران اولیه ساخته شده است که می توانید برای خروجی فایل های G-code ساده استفاده کنید. یک مثال جادوگر نوشتن است که می توانید آن را سریع به نوشتن یک متن و خروجی آن به G-code بسپارید. (به عنوان مثال در مرحله 17 مراجعه کنید).
مرحله 17: استفاده از ماشین
پس از چند ماه کار، دستگاه در نهایت به پایان رسید. پس از آزمایش اولیه، اولین چیزی که من انجام دادم، برخی از گیره های محکم بود. اولین پروژه “بزرگ”، محوطه الکترونیک بود که شما در مرحله 15 دیده اید. همچنین برخی از انواع مختلف دنده ها و بعضی نشانه ها را برش دادم. برای بعضی از جعبه های گیتار، من مغازه ی Etsy را دیدم .
یک چیزی که من به سرعت متوجه شدم این بود که یک روتر سی ان سی باعث گرد و غبار فراوانی می شود و می تواند بسیار بلند باشد. برای رفع مشکل گرد و غبار من یک گرد و غبار را که می توانم یک فروشگاه مجزا به آن متصل کنم، ساخته ام. کاهش سطح نویز مشکل تر بود. پدر و مادر من به اندازه کافی برای پرداخت هزینه های مواد برای ساخت یک محفظه کامل برای دستگاه پرداختند. بنابراین من یک کابینه بزرگ ساختم که در آن روتر سی ان سی ایستاده است. از صفحات جذب نویز برای پوشش داخل دیوارها استفاده کردم. الکترونیک و مغازه ویو می توانند در دو بخش مختلف زیر دستگاه نشسته باشند. کابینت واقعا سطح سر و صدا را کاهش می دهد و باعث می شود که دستگاه حتی بیشتر سرگرم کننده باشد.