

موتورهای پله ای
R را هرکدام و نوک انگشت خود را به نوک بینی خود بکشید. هیچ مشکلی نیست چشمان بسته را دوباره ببندید و هنوز هم ساده است: شما هرگز دست از دست ندهید. حتی در افراد غیرمعمول مانند من، مغز عمدتا دارای کنترل بدن است. در ورزشکاران، هنرمندان، رقصنده های باله و جراحان، “کنترل” به معنای دقت مطلق است. در حال حاضر تصور کنید که تلاش برای ایجاد یک ربات با همان درجه عالی مکانیسم، با استفاده از چرخ دنده ها ، چرخ ها و اهرم برای انجام آنچه که بدن با عضله و استخوان انجام می شود. این یک دستور بسیار بلند است که باعث می شود بدن انسان حتی بیشتر چشمگیر باشد. یکی از مشکلات بزرگ ساخت روبات های رفتار شده این است که موتورهای الکتریکی ساده به طور دقیق حرکت نمی کنند. به همین دلیل بسیاری از روبات ها مبادرت به موتورهای عادی برای آنچه که موتور پله ای (یا گاهی اوقات موتورهای پله ای) نامیده می شوند، می توانند از طریق “مراحل” – زاویه مشخص تعریف شوند – تحت کنترل دقیق الکترونیکی . آنها چگونه کار می کنند؟ بیایید نگاهی دقیق تر بیاندازیم
عکس: دو موتور پله معمولی DC از یک چاپگر جوهر افشان قدیمی. چگونه می دانیم؟ چندین سر و صدای خارج از آنها وجود دارد (برخلاف موتور DC ساده که تنها دو سرنخ دارد). راه دیگری برای گفتن یک موتور پله ای این است که آن را در نزدیکی گوش خود نگه دارید و به آرامی انگشتان محور را بچرخانید. شما باید گام های فردی را بشنوید و احساس کنید، کمی شبیه سیم پیچ ساعت مچی است.
با موتورهای معمولی اشتباه اشتباه است؟
یک موتور الکتریکی عادی بر پایه ی یک علم یکتا از علم مغناطیسی است که همه ما در مدرسه یاد می گیریم: بر خلاف قطب ها جذب می شود، مثل قطب ها، دفع می کنند. در اینجا یک موتور اساسی کار می کند. شما یک آهنربای حلقه ای را می گیرید، سیم پیچ سیم را داخل آن قرار می دهید و از طریق سیم برق را تغذیه می کنید. به عبارت دیگر، سیم به یک آهنربای موقت متصل می شود و یک میدان الکترو مغناطیسی، به عبارت دیگر، و میدان مغناطیسی آن ایجاد می کند که میدان مغناطیسی دائمی آن را احاطه کرده است. با تغییر دادن جریانی روشن و خاموش با یک دستگاه کوچک هوشمندانه به نام یک سوئیچ ، و برخی از تماس های الکتریکی به نام برس ، می توانید سیم را به طور یکنواخت به طور نامحدود چرخان کنید. تغذیه برق (انرژی الکتریکی) را به آن و شما حرکت (انرژی مکانیکی) را از دست می دهید. این جوهر یک موتور معمولی است که از DC (جریان مستقیم) برق استفاده می کند. اگر کمتر از این مطمئن باشید که چگونه یک موتور مانند این کار می کند، ممکن است بخواهید مقاله مقدماتی خود را درباره موتورهای الکتریکی بررسی کنید .

عکس: موتور الکتریکی قدرتمند از یک ماشین چمن زنی قدیمی. اسلات در جلو بخشی از سوئیچ است که یک دستگاه هوشمندانه است که جریان الکتریکی را خنثی می کند و روتور (قسمت مرکزی چرخش موتور) را در همان جهت می چرخاند.
ما همچنین می توانیم موتورهایی را تولید کنیم که با استفاده از AC (جریان متناوب) به جای DC کار می کنند. اگر چه آنها در یک روش کاملا متفاوت طراحی شده اند، اما هنوز هم بر اساس “مانند قطب های دفع، بر خلاف قطب جذب” است: برق که قدرت موتور باعث جذب مغناطیسی و تحریک و نیرویی است که باعث چرخش موتور می شود. در مقاله ما در موتورهای القایی AC اطلاعات بیشتری در مورد موتورهای AC پیدا خواهید کرد که در موتور القایی نیز نامیده می شوند.
این که آیا آنها از طریق DC یا AC کار می کنند، موتورهای معمولی، عضلات الکتریکی پنهان هستند که زندگی مدرن را تقویت می کنند: شما آنها را در انواع گجت ها و عجایب دنیا در اطراف خود پیدا خواهید کرد، از انبساط و یخچال و فریزر مواد غذایی به جارو برقی و برق قطارها اما در تمام این ماشین ها، روتور موتور آنها به طور پیوسته چرخش می یابد. هنگامی که شما یک فرش را میشویید یا به وسیله مترو کار می کنید، موتورهایی که برای شما کار می کنند، تعداد دورهای دلخواه خود را عوض می کنند: کنترل دقیقی از چند بار چرخش و زاویه ای که آنها از آن عبور نمی کنند، وجود ندارد – و واقعا نمی کند موضوع.

عکس: موتور دهان: این روبات “عاطفی” چهره ای دارد که می تواند عبارات مختلف را نشان دهد. قطعات مختلف توسط موتورهای پله ای کنترل می شوند، دقیقا توسط مدار های الکترونیکی کنترل می شوند.
در حال حاضر فرض کنید شما می خواهید یک بازوی ربات الکتریکی ایجاد کنید که از یک زاویه دقیق (تعداد دقیق درجه) عبور می کند تا بتواند یک فنجان قهوه را از روی میز خود بیرون بکشد. شما می توانید یک موتور الکتریکی را بر روی یک اهرم چوبی یا پلاستیکی قرار دهید تا وقتی که قدرت را روشن می کنید روشن می شود و شما می توانید قدرت را خیلی کوتاه بچرخانید تا بازو از طریق یک زاویه مشخص حرکت کند و سپس متوقف می شود. مشکل این است که هیچ راهی برای دانستن اینکه چقدر زاویه موتور (یا بازو) حرکت می کند وجود ندارد: این بستگی به همه چیز از قدرت موتور و جریان الکتریکی آن را به وزن بازو و حتی به چه شیوه ای باد در حال وزیدن است. یک موتور که در چنین روشی دلخواه حرکت می کند هیچ کاربردی در رباتیک ندارد: قهوه شما قطعا در کف زمین قرار می گیرد! این جایی است که یک موتور پله ای وارد می شود: این نوع خاصی از موتور DC طراحی شده است، بنابراین شما می توانید آن را از طریق یک زاویه دقیق چرخش، به جای چرخش به دور مقدار تصادفی.
دقیقا یک موتور پله ای است؟

عکس: فلسفۀ قدمها: ما گام هایی را به عنوان راهی برای صعود به فکر می کنیم، اما آنها همچنین راهی برای شکستن یک فاصله ثابت به قطعه های مساوی هستند تا ما بتوانیم بیشتر از جنبش هایمان کنترل بیشتری داشته باشیم. ما می توانیم از آنها به عنوان تبدیل مقادیر مبهم، متغیر، مقادیری از فاصله به قطعات خاص، دیجیتال و دیجیتال فکر کنیم.
موتورهای قدم به قدم با حداقل چهار روش مهم از موتورهای معمولی DC متفاوت هستند.
اولین تفاوت شما متوجه شده اید که آنها هیچ برس یا سوئیچ ندارند (قطعات موتور DC که جریان الکتریکی را تغییر می دهد و روتور را حفظ می کند – قسمت چرخشی یک موتور به طور مداوم در یک جهت حرکت می کند). به عبارت دیگر، موتورهای پله ای نمونه هایی از آنچه ما موتورهای بدون درز می نامیم. (شما همچنین موتورهای بدون چرخه را در بسیاری از وسایل نقلیه الکتریکی پیدا خواهید کرد، در هاب های چرخ پنهان شده و به همین ترتیب، آنها موتورهای هیدرولیکی هستند .)
دومین تفاوت عمده این است که چه چیزی چرخش دارد. به یاد داشته باشید که در یک موتور DC اولیه یک آهنربای دائمی دائمی یا مغناطیسی وجود دارد که ثابت می شود، به عنوان استاتور شناخته می شود و یک سیم پیچ داخلی یا سیم پیچ که درون آن چرخش می کند، که روتور است. در یک موتور توپی بدون قلم، کویل های سیم در مرکز ایستا هستند و آهنرباهای دائمی در اطراف آنها چرخ می زنند. یک موتور پله متفاوت است. در این زمان، آهنرباهای دائمی در داخل و چرخش (ساخت روتور)، در حالی که کویل در خارج است و ماندگار می شود (تشکیل استاتور).
سومین تفاوت بزرگ بین موتور DC معمولی و یک موتور پله ای در طراحی استاتور و روتور است. به جای یک آهنربای بزرگ در خارج از (استاتور) و یک کویل بزرگ چرخش درون آن (روتور)، یک موتور پله دارای یک آهنربا درونی است که به طور قابل توجهی به بخش های جداگانه تقسیم می شود که دندان ها را بر روی یک چرخ دنده نشان می دهد . کویل های بیرونی دارای دندان های متفاوتی هستند که باعث تحریک مغناطیسی می شوند، جذب، دفع و ایجاد دندان های چرخ داخلی را با گام های کوچک می چرخانند. این در لحظه ای روشن می شود که ما به برخی از تصاویر نگاه می کنیم.
تفاوت نهایی این است که یک موتور پله می تواند در موقعیت خاصی باقی بماند، در حالی که از طریق یک زاویه خاص چرخش دارد. بدیهی است مهم است که اگر موتور بخواهد چیزی شبیه یک بازوی ربات را به کار ببندد، ممکن است مقدار مشخصی را بچرخاند و سپس دقیقا در آن نقطه باقی بماند، در حالی که بخش دیگری از روبات کاری را انجام می دهد. این ویژگی گاهی اوقات گشتاور نگه داشته می شود (گشتاور نیروی چرخشی است، بنابراین “نگه داشتن گشتاور” به معنای توانایی موتور پله ای برای ماندن است).
چگونه یک موتور پله ای کار می کند؟
ساخت اساسی
من قصد دارم ساده تر موتورهای مرحله ای را برای نشان دادن ایده ساده و مرکزی ساده توضیح دهم: (درون) روتور یک موتور پله به مقادیر کوچک (گام) تبدیل می شود، زیرا استاتور (خارج) اعمال مغناطیسی را اعمال می کند که آن را بیرون می کشاند .

عکس: یک روتور موتور پله از دو دیسک به هم متصل شده است، بنابراین ما یک سری قطب های متناوب شمال و جنوب را می گیریم. من این ایده را با رنگ کردن دستهایم و قرار دادن آنها بر روی یکدیگر، شبیه سازی کرده ام، انگشتان هنگام مشاهده از بالا، جایگزین می شوند.
روتور
روتور خود را از دو دیسک ساخته شده است، کمی مانند چرخ دنده ها، یکی از آنها یک قطب شمال مغناطیسی (قرمز) و دیگری قطب جنوب (آبی) است. هنگامیکه دو دیسک را به پشت برگردیم، دندانهای شمال و جنوب را در اطراف لبه متناوب می کنیم. اگر چهره ای را به تصویر بیاورید، تصور کنید دست چپ خود یک قطب مغناطیسی است و قرمز رنگ است، در حالی که دست راست خود یک قطب مغناطیسی و آبی رنگ است. اگر یک دست را بر روی دیگر قرار دهید، انگشتان یک دست با انگشت های دیگر جایگزین می شود، سپس به پایین نگاه کنید، دندان های متناوب دندان شمالی و جنوب را در اطراف لبه خواهید دید. این چیزی است که ما در روتور یک موتور پله ای داریم.
استاتور
در اطراف لبه روتور، ما استاتور داریم: در این مثال، چهار الکترومغناطیسی که می توانند به صورت جداگانه روشن و خاموش شوند. به طور کلی، الکترومغناطیس در یک موتور پله ای در جفت ها کار می کند، هر جفت مغناطیسی متضاد با هم به هم متصل می شوند تا همزمان یک قطب شمال ایجاد کنند، به همین ترتیب مغناطیسی با زاویه ی راست، که هم با هم کار می کنند. من ترجیح می دهم آن را کمی متفاوت راه، که من فکر می کنم ساده تر و آسان تر است. دقیقا همان چیزی که سوئیچ می کند وقتی بستگی دارد که چقدر دندان های روتور (مراحل) وجود دارد و تعداد الکترومغناطیسی ها آنها را محاصره می کند: هندسه و تراز یک موتور پله ای باید درست باشد تا چرخش روتور ایجاد شود.
چگونه چرخش می کند
- الکترومغناطیس راست انرژی دارد و به قطب شمال تبدیل می شود (قرمز) و الکترومغناطیسی سمت چپ تبدیل به قطب جنوب (آبی) می شود. این باعث می شود که روتور در یک مرحله بچرخد تا دندان آبی روی روتور به سمت الکترومغناطیس راست حرکت کند و دندان قرمز به سمت الکترو مغناطیسی سمت چپ حرکت کند.
- اکنون الکترومغناطیسی پایین به یک قطب شمالی تبدیل می شود، آهنربای بالا یک قطب جنوبی می شود و دو آهنربای افقی خاموش می شود. مجددا دندان های روتور به یک مرحله می رسند.
- آهنرباهای عمودی در حال حاضر خاموش می شوند و آهنرباهای افقی دوباره فعال می شوند، اما با قطب مخالف (الگوی مغناطیس) که قبلا داشتند. دندان های روتور با یک مرحله دیگر پیشرفت می کنند.
- در نهایت، آهن ربا عمودی دوباره روشن می شود، در قطب مقابل به قبل، و آهن ربا افقی خاموش است. روتور حدود یک قدم بیشتر. تمام چرخه پس از آن تکرار می شود.
به یاد داشته باشید که یک موتور پله واقعا طراحی نشده است که بتواند در اطراف و اطراف چرخان نگه داشته شود: با ارسال چندین یا چند ضربان به الکترومغناطیسی بیرونی در صورت لزوم، ما می توانیم روتور را از طریق تعدادی از مراحل (و به همین ترتیب توسط یک زاویه دقیق) ما می توانیم آن را با چرخش جریان الکتریکی چرخانیم.
انواع موتورهای پله ای
این فقط یک مرور ساده ساده از موتورهای پله است و من جزئیات بیشتری در مورد تمام انواع مختلفی که شما پیدا می کنید را نخواهید دید. بعضی از اصطلاحات فنی که اغلب در ادبیات (و در صفحات وب) درباره موتورهای پله ای، اغلب بدون توضیح، اغلب در معرض آگاهی قرار می گیرند.
لهستانی ها
موتور من در اینجا نشان داده است یک آهنربای روتور تقسیم به تعداد زیادی قطب شمال و جنوب متناوب است، بنابراین این طراحی به عنوان یک موتور چند قطعه شناخته شده است. قطر بیشتر، کوتاه تر از فاصله موتور در هر مرحله به چرخش و دقیق تر می توان آن را کنترل می شود.
فاز
در یک موتور، “فاز” معمولا به معنی یک یا دو الکترومغناطیسی متضاد است که به صورت متناوب (از هماهنگی با یکدیگر یا خارج از فاز، اگر شما ترجیح می دهید). موتوري که بالاي آن نشان داده شده است، دو فاز دارد (دو جفت الکترومغناطيسي، به طبع چهار الکترومغناطيسي در مجموع، در 90 درجه قرار دارند). در یک موتور سه مرحله ای، شما ممکن است سه الکترومغناطیسی را در زاویه 120 درجه مرتب کنید (به همین ترتیب سه الکترومغناطیسی جداگانه، اگرچه یک موتور سه فازی نیز می تواند دارای سه جفت با فاصله 60 درجه باشد). یک موتور چهار فاز دارای هشت الکترومغناطیسی است که در چهار جفت قرار گرفته اند و هر یک از آنها 45 درجه است.


عکس ها: در داخل یک فاز دو مرحله ای، موتور پله می تواند پشته شود: همه موتورهای پله ای نگاه نمی کنند و دقیقا مانند کارهای هنری من و انیمیشن بالا عمل می کنند. این یک نمونه از یک آهنربا دائمی است، می تواند موتور پله، که در آن قطعات در لایه ها مرتب شده اند، پشته شوند. در اولین عکس، می توانید ببینید چه اتفاقی افتاده است. در عکس دوم، من تمام بیت ها را گرفته و مرتب کرده ام. آنها عبارتند از: 1) فنجان استاتور بالا و دندان های بیرونی. 2) روتور (یک آهنربای دائمی چند قطبی ثابت به یک شفت در حال چرخش)؛ 3) سیم پیچ بالا 4) دندان های استاتور داخلی؛ 5) سیم پیچ پایین؛ 6) فنجان و دندان پایینتر استاتور. این کار به شیوه ای شبیه به موتور انجام شده در بالا توضیح داده است، به جز اینکه دندان ها ثابت (بخشی از استاتور) هستند، در حالی که یک آهنربا دائمی (از چند قطب) ساخته شده در داخل آنها چرخش می کند و شفت موتور را به اطراف چرخان می کند این کار را می کند
مزایا و معایب موتورهای پله ای
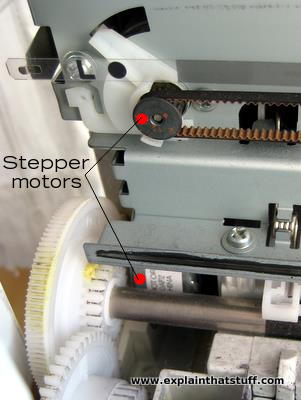
عکس: داخل یک چاپگر جوهر افشان ، یک کاربرد بسیار رایج موتورهای پله ای است. شما می توانید موتورهای دو مرحله ای را ببینید: در قسمت بالا یک کارتریج جوهر را می گیرد و با چرخاندن کمربند سیاه و قهوه از سمت چپ به راست چاپ می شود، در حالی که پایین یک چرخ دنده های سفید را چرخانده، غلطک های کاغذ را عوض می کند و کاغذ را تغذیه می کند .
دلیل استفاده از یک موتور پله ای برای دستیابی به کنترل دقیق است: شما می توانید آن را از طریق یک زاویه تعریف شده حرکت دهید. اما اشکالات نیز وجود دارد. موتورهای گام به گام گاهی اوقات بسیار پیچیده هستند، زیرا هر گام را با یک ضربه ناگهانی شروع می کنند و هر گام را متوقف می کنند، که همیشه در مورد تلاش برای ساخت یک ماشین دقیق، چیزی نیست که شما می خواهید. یک جایگزین برای استفاده از یک موتور پله ای، استفاده از یک موتور سروو است : یک موتور با مکانیسم بازخورد ساخته شده است. به طور معمول، یک موتور سروو چیزی است که یک رمزگذار نوری متصل به روتور آن است. در انگلیسی ساده، این یک دیسک الگوی سیاه و سفید است که در مقابل چیزی شبیه یک سلول فوتوالکتریک حرکت می کند . همانطور که دیسک روشن می شود، سلول سیاه و سفید را تشخیص می دهد و مدار الکتریکی از این دقیقا چقدر دیسک چرخانده است. با استفاده از این بازخورد، موتور را می توان به طور مساوی (و به طور معمول خیلی دقیق تر) از یک موتور پله ساده کنترل کرد. موتورهای سروو در طراحي بسيار پيچيده تر از موتورهاي پله اي هستند و تمایل دارند گران تر باشند، به همین دلیل استپرس ها اغلب به جای آن استفاده می شود.
چه کسی موتور پله را اختراع کرد؟
برای پول من، فرانک وود وود در چندین اختراع ثبت شده بین سالهای 1912 و 1918 بود. در اینجا طرح طراحی شده 1918 (که به طور رسمی در تاریخ 7 مارس 1922 ثبت شد) با عنوان “هنر تولید جنبش های گام به گام” که یک حلقه بیرونی از پنج آهن ربا (که در ترکیب های مختلف از آن متصل می شود) استفاده می شود تا یک جفت آهنرباهای داخلی و چرخش شفت ایجاد شود. در کلمات خود ویو، ابزار خود را “جنبش گام به گام به یک عنصر قابل رؤیت … تولید شده توسط اثر حاصل از تعدادی مدار مغناطیسی تولید می کند.”