
چگونه یک موتور پله ای کار می کند
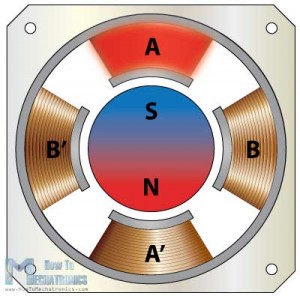
موتور پله ای یک موتور دیفرانسیل بدون درز است که در مراحل چرخشی قرار دارد. این بسیار مفید است زیرا می توان آن را دقیقا بدون هیچ سنسور بازخوردی که نشان دهنده یک کنترل کننده باز است قرار می دهد. موتور پله شامل یک روتور است که معمولا یک آهنربا دائمی است و توسط پیچ های استاتور احاطه شده است. همانطور که ما سیم پیچ ها را گام به گام در یک جهت خاص فعال می کنیم و جریان جریان را از طریق آنها به جریان می رسانیم، استاتور را به هم متصل می کنیم و به ترتیب قطب های الکترومغناطیسی را ایجاد می کنیم که موتور را به موتور تبدیل می کند. بنابراین “اصل کار پایه موتورهای پله ای.
حالت رانندگی
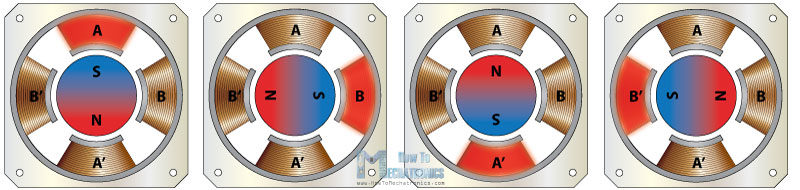
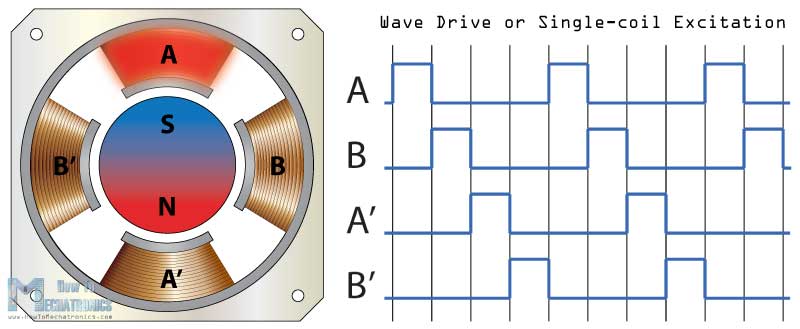
چند راه مختلف برای رانندگی موتور پله وجود دارد. یکی از آنها یکی از رانندگان موج و یا تک زاویه است. در این حالت ما فقط یک کویل را در یک زمان فعال می کنیم که به این معنی است که برای این نمونه از موتور با 4 کویل، روتور چرخه کامل را در 4 مرحله ایجاد می کند.
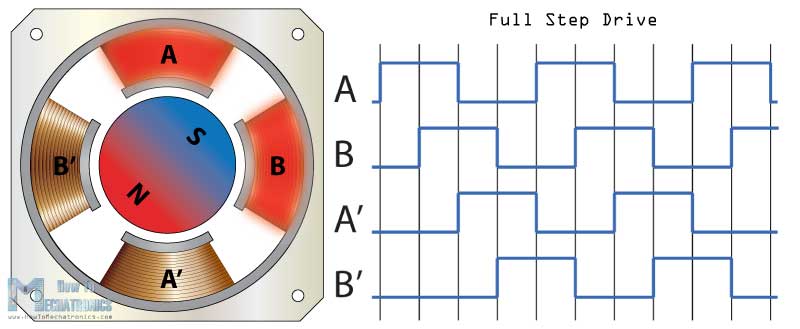
بعد حالت درایو کامل است که خروجی گشتاور بسیار بالاتری را ارائه می دهد زیرا ما در هر لحظه دارای دو کویل فعال هستیم. با این وجود این قطعنامه از پله ها را بهبود نمی بخشد و دوباره روتور چهار مرحله ای را در چهار مرحله ایجاد می کند.
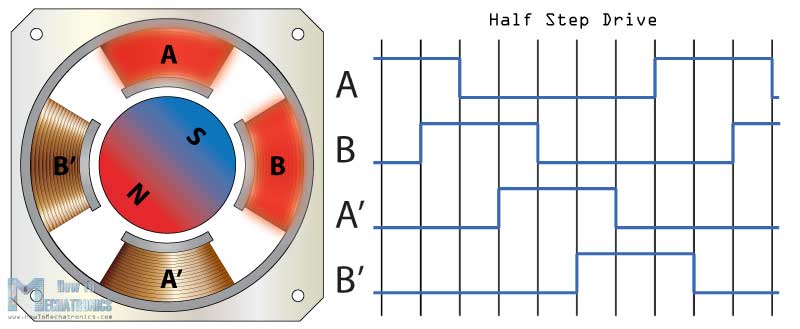
برای افزایش رزولوشن پله، ما از حالت نیمه مرحله ای استفاده می کنیم. این حالت در واقع ترکیبی از دو حالت قبلی است.
در اینجا ما یک کویل فعال و دو کویل فعال داریم و سپس یک کویل فعال و سپس 2 کویل فعال و غیره. بنابراین با این حالت ما با همان ساختار دو برابر رزولوشن می کنیم. در حال حاضر روتور چرخه کامل را در 8 مرحله کامل می کند.
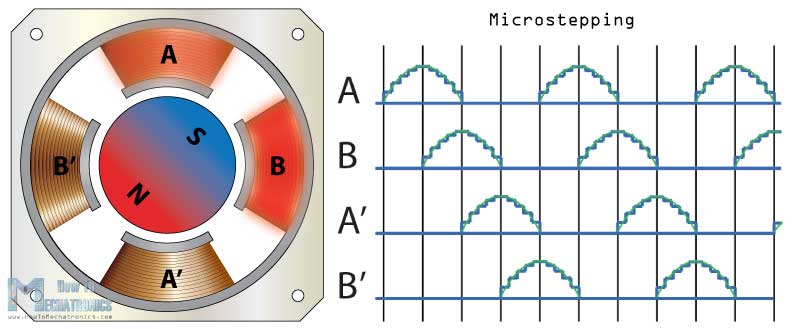
 با این حال شایع ترین روش کنترل موتور پله ای امروزه Microstepping است. در این حالت ما جریان متناوب کنترل شده را به شکل موج گشتاور به سیم پیچ ها ارائه می کنیم. این باعث حرکت صاف روتور، کاهش استرس قطعات و افزایش دقت موتور موتور پله می شود.
با این حال شایع ترین روش کنترل موتور پله ای امروزه Microstepping است. در این حالت ما جریان متناوب کنترل شده را به شکل موج گشتاور به سیم پیچ ها ارائه می کنیم. این باعث حرکت صاف روتور، کاهش استرس قطعات و افزایش دقت موتور موتور پله می شود.
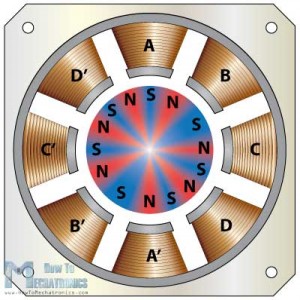
یکی دیگر از راه های افزایش رزولوشن موتور استاپر با افزایش تعداد قطب های روتور و تعداد قطب استاتور است.
انواع موتورهای قدم زنی با ساخت و ساز
با ساخت و ساز 3 نوع مختلف از موتور پله وجود دارد: پله آهنربا دائمی، میلگردهای متغیر ابهام و موتور ژنراتور هماهنگ موتور.
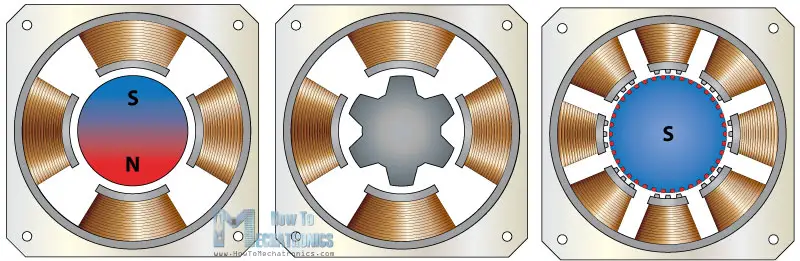
استپ مگنت دائم دارای یک روتور دائمی مغناطیسی است که توسط سیم پیچ های استاتور هدایت می شود. آنها قطبهای قطب مقابل را نسبت به قطب های روتور ایجاد می کنند که روتور را به حرکت در می آورد.
نوع بعدی، موتور Stepper Reluctant متغیر از یک روتور آهن نرم غیر مغناطیسی استفاده می کند. روتور دارای دندان هایی است که از استاتور جبران می شود و همانطور که ما سیم پیچ ها را در یک جهت خاص فعال می کنیم، روتور به ترتیب حرکت می کند تا حداقل قطر بین استاتور و دندان روتور
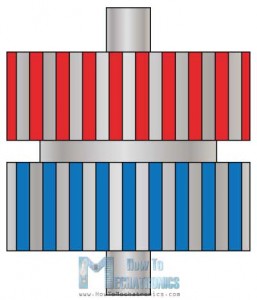
موتور ترکیبی دوقطبی ترکیبی از دو مرحله قبلی است. این روتور دائمی آهنربا دندانه دار و همچنین یک استاتور دندانه دار است. روتور دارای دو بخش است که در قطب مخالف هستند و دندان هایشان به صورت زیر نشان داده شده اند.
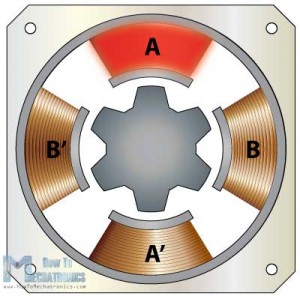
این یک دید جلو از یک موتور استپرو هیبرید معمولی است که دارای 8 قطب در استاتور است که توسط 2 سیم پیچ A و B فعال می شوند. بنابراین اگر ما سیم پیچ A را فعال کنیم، ما 4 قطب را که دو نفر از آنها قطب جنوب و دو قطب شمال آن است.

ما می توانیم ببینیم که به طریقی دندان های روتور با دندان های قطب A A aligned شده و با دندان های قطب B اختلاف پیدا می کنند. بدین معنا که در مرحله بعد وقتی قطب های A را خاموش می کنیم و قطب های B را فعال می کنیم روتور ساعت عقربه ای حرکت می کند و دندان هایش با دندان های قطب B هم تراز می کنند.
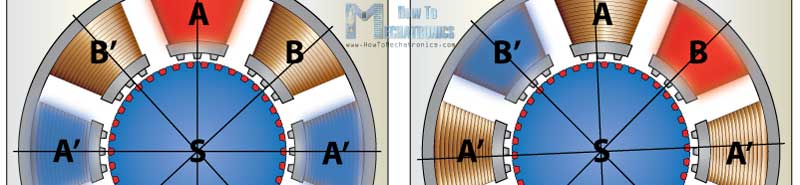
اگر ما در یک جهت خاص فعال سازی قطبها را ادامه دهیم، روتور به طور پیوسته حرکت می کند. در اینجا ما همچنین می توانیم از حالت های مختلف رانندگی مانند درایو موج، درایو کامل مرحله، درایو نیمی از گام و میکروسپایه برای افزایش رزولوشن موتور پله استفاده کنیم.